BPTT (backpropagation through time)
Contents
BPTT (backpropagation through time)#
通時的誤差逆伝播法
モデルの定義#
ライブラリの読み込み.
using Base: @kwdef
using Parameters: @unpack # or using UnPack
using Random, ProgressMeter, PyPlot
f(x) = tanh(x)
df(x) = 1 - tanh(x)^2;
@kwdef struct RNNParameter{FT}
dt::FT = 1 # time step (ms)
τ::FT = 10 # time constant (ms)
α::FT = dt / τ
η::FT = 1e-2 # learning rate
end
w_inは入力層から再帰層への重み,w_recは再帰重み,w_outは出力重みである.
@kwdef mutable struct RNN{FT}
param::RNNParameter = RNNParameter{FT}()
n_batch::UInt32 # batch size
n_in::UInt32 # number of input units
n_rec::UInt32 # number of recurrent units
n_out::UInt32 # number of output units
h0::Array{FT} = zeros(n_batch, n_rec) # initial state of recurrent units
# weights
w_in::Array{FT} = 0.1*(rand(n_in, n_rec) .- 1)
w_rec::Array{FT} = 1.5*randn(n_rec, n_rec)/sqrt(n_rec)
w_out::Array{FT} = 0.1*(2*rand(n_rec, n_out) .- 1)/sqrt(n_rec)
bias::Array{FT} = zeros(1, n_rec)
# changes to weights
dw_in::Array{FT} = zero(w_in)
dw_rec::Array{FT} = zero(w_rec)
dw_out::Array{FT} = zero(w_out)
dbias::Array{FT} = zero(bias)
end
7.9.2 更新関数の定義#
function update!(variable::RNN, param::RNNParameter, x::Array, y::Array, training::Bool)
@unpack n_batch, n_in, n_rec, n_out, h0, w_in, w_rec, w_out, bias, dw_in, dw_rec, dw_out, dbias = variable
@unpack dt, τ, α, η = param
t_max = size(x)[2] # number of timesteps
u, h = zeros(n_batch, t_max, n_rec), zeros(n_batch, t_max, n_rec) # input (feedforward + recurrent), time-dependent RNN activity vector
h[:, 1, :] = h0 # initial state
ŷ = zeros(n_batch, t_max, n_out) # RNN output
error = zeros(n_batch, t_max, n_out) # readout error
for t in 1:t_max-1
u[:, t+1, :] = h[:, t, :] * w_rec + x[:, t+1, :] * w_in .+ bias
h[:, t+1, :] = h[:, t, :] + α * (-h[:, t, :] + f.(u[:, t+1, :]))
ŷ[:, t+1, :] = h[:, t+1, :] * w_out
error[:, t+1, :] = y[:, t+1, :] - ŷ[:, t+1, :] # readout error
end
# backward
if training
z = zero(h)
z[:, end, :] = error[:, end, :] * w_out'
for t in t_max:-1:1
zu = z[:, t, :] .* df.(u[:, t, :])
if t ≥ 2
z[:, t-1, :] = z[:, t, :] * (1 - α) + error[:, t, :] * w_out' + zu * w_rec * α
dw_rec[:, :] += h[:, t-1, :]' * zu
end
# Updates Δweights:
dw_out[:, :] += h[:, t, :]' * error[:, t, :]
dw_in[:, :] += x[:, t, :]' * zu
dbias[:, :] .+= sum(zu)
end
# update weights
w_out[:, :] += η / t_max * dw_out
w_rec[:, :] += η / t_max * α * dw_rec
w_in[:, :] += η / t_max * α * dw_in
bias[:, :] += η / t_max * α * dbias
# reset
dw_in[:, :] = zero(w_in)
dw_rec[:, :] = zero(w_rec)
dw_out[:, :] = zero(w_out)
dbias[:, :] = zero(bias)
end
return error, ŷ, h
end
update! (generic function with 1 method)
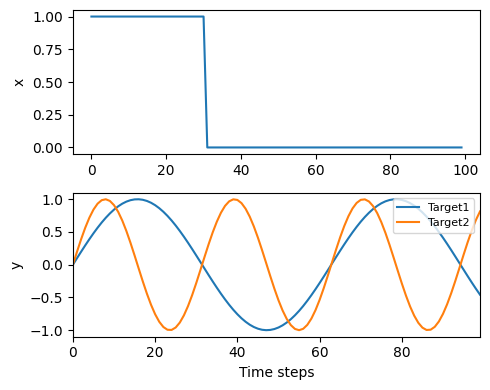
正弦波の学習#
例として正弦波を出力するRNNを考える.入力1,中間64, 出力2のRNNである.
nt = 100 # number of timesteps in one period
n_batch = 1 # batch size
n_in = 1 # number of inputs
n_out = 2 # number of outputs
begin_input = 0 # begin time steps of input
end_input = 30 # end time steps of input
tsteps = 0:nt-1 # array of time steps
x = ones(n_batch) * (begin_input .≤ tsteps .≤ end_input)' # input array
y = zeros(n_batch, nt, n_out) # target array
y[:, begin_input+1:end, 1] = sin.(tsteps[1:end-begin_input]*0.1)
y[:, begin_input+1:end, 2] = sin.(tsteps[1:end-begin_input]*0.2)
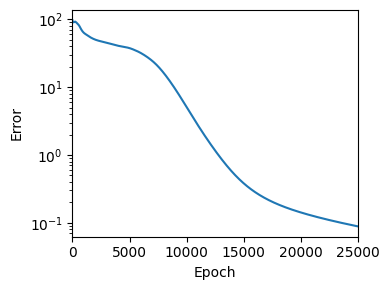
n_epoch = 25000 # number of epoch
# memory array of each epoch error
error_arr = zeros(Float32, n_epoch);
入力と訓練データの確認をする.
figure(figsize=(5, 4))
subplot(2,1,1); plot(x[1, :]); ylabel("x")
subplot(2,1,2); plot(tsteps, y[1, :, 1], label="Target1"); plot(tsteps, y[1, :, 2], label="Target2")
xlabel("Time steps"); ylabel("y"); xlim(0, tsteps[end])
legend(loc="upper right", fontsize=8)
tight_layout()
モデルの定義をする.
rnn = RNN{Float32}(n_batch=n_batch, n_in=n_in, n_rec=32, n_out=n_out);
学習を実行する.
@showprogress "Training..." for e in 1:n_epoch
error, ŷ, h = update!(rnn, rnn.param, x, y, true)
error_arr[e] = sum(error .^ 2)
end
損失の推移を確認する.
figure(figsize=(4,3))
semilogy(error_arr); ylabel("Error"); xlabel("Epoch"); xlim(0, n_epoch)
tight_layout()
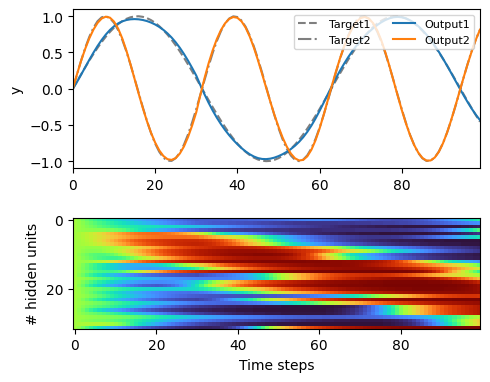
学習後の出力の確認#
error, ŷ, h = update!(rnn, rnn.param, x, y, false)
println("Error : ", sum(error.^2))
Error : 0.08867016605631522
見やすいように出力のピークに応じて中間層のユニットをソートする.
max_idx = Tuple.(argmax(h[1, :, :]', dims=2))
h_ = h[1, :, sortperm(last.(max_idx)[:, 1])];
出力層,中間層の出力を描画する.
figure(figsize=(5, 4))
subplot(2,1,1)
plot(tsteps, y[1, :, 1], "--k", alpha=.5, label="Target1")
plot(tsteps, y[1, :, 2], "-.k", alpha=.5, label="Target2")
plot(tsteps, ŷ[1, :, 1], label="Output1")
plot(tsteps, ŷ[1, :, 2], label="Output2")
ylabel("y"); xlim(0, tsteps[end])
legend(loc="upper right", ncol=2, fontsize=8)
subplot(2,1,2)
imshow(h_', cmap="turbo", aspect=0.85)
xlabel("Time steps"); ylabel("# hidden units")
tight_layout()