無限時間最適フィードバック制御モデル
Contents
無限時間最適フィードバック制御モデル#
モデルの構造#
無限時間最適フィードバック制御モデル (infinite-horizon optimal feedback control model) [Qian et al., 2013]
実装#
ライブラリの読み込みと関数の定義.
using Base: @kwdef
using Parameters: @unpack
using LinearAlgebra, Kronecker, Random, BlockDiagonals, PyPlot
rc("axes.spines", top=false, right=false)
rc("font", family="Arial")
定数の定義
@kwdef struct SaccadeModelParameter
n = 4 # number of dims
i = 0.25 # kgm^2,
b = 0.2 # kgm^2/s
ta = 0.03 # s
te = 0.04 # s
L0 = 0.35 # m
bu = 1 / (ta * te * i)
α1 = bu * b
α2 = 1/(ta * te) + (1/ta + 1/te) * b/i
α3 = b/i + 1/ta + 1/te
A = [zeros(3) I(3); -[0, α1, α2, α3]']
B = [zeros(3); bu]
C = [I(3) zeros(3)]
D = Diagonal([1e-3, 1e-2, 5e-2])
Y = 0.02 * B
G = 0.03 * I(n)
Q = Diagonal([1.0, 0.01, 0, 0])
R = 0.0001
U = Diagonal([1.0, 0.1, 0.01, 0])
end
SaccadeModelParameter
とする.元論文では\(F, \bar{F}\)が定義されていたが,\(F=0\)とするため,以後の式から削除した.
\(\mathbf{A} = (a_{ij})\) を \(m \times n\) 行列,\(\mathbf{B} = (b_{kl})\) を \(p \times q\) 行列とすると、それらのクロネッカー積 \(\mathbf{A} \otimes \mathbf{B}\) は
で与えられる \(mp \times nq\) 区分行列である.
Roth’s column lemma (vec-trick)
によりこれを解くと,
となる.ここで\(\mathbf{I}=\mathbf{I}^\top\)を用いた.
K, L, S, Pの計算#
LとKをランダムに初期化
SとPを計算
LとKを更新
収束するまで2と3を繰り返す.
収束スピードはかなり速い.
function infinite_horizon_ofc(param::SaccadeModelParameter, maxiter=1000, ϵ=1e-8)
@unpack n, A, B, C, D, Y, G, Q, R, U = param
# initialize
L = rand(n)' # Feedback gains
K = rand(n, 3) # Kalman gains
I₂ₙ = I(2n)
for _ in 1:maxiter
Ā = [A-B*L B*L; zeros(size(A)) (A-K*C)]
Ȳ = [-ones(2) ones(2)] ⊗ (Y*L)
Ḡ = [G zeros(size(K)); G (-K*D)]
V = BlockDiagonal([Q, U]) + [1 -1; -1 1] ⊗ (L'* R * L)
# update S, P
S = -reshape((I₂ₙ ⊗ (Ā)' + (Ā)' ⊗ I₂ₙ + (Ȳ)' ⊗ (Ȳ)') \ vec(V), (2n, 2n))
P = -reshape((I₂ₙ ⊗ Ā + Ā ⊗ I₂ₙ + Ȳ ⊗ Ȳ) \ vec(Ḡ * (Ḡ)'), (2n, 2n))
# update K, L
P₂₂ = P[n+1:2n, n+1:2n]
S₁₁ = S[1:n, 1:n]
S₂₂ = S[n+1:2n, n+1:2n]
Kₜ₋₁ = copy(K)
Lₜ₋₁ = copy(L)
K = P₂₂ * C' / (D * D')
L = (R + Y' * (S₁₁ + S₂₂) * Y) \ B' * S₁₁
if sum(abs.(K - Kₜ₋₁)) < ϵ && sum(abs.(L - Lₜ₋₁)) < ϵ
break
end
end
return L, K
end
infinite_horizon_ofc (generic function with 3 methods)
param = SaccadeModelParameter()
L, K = infinite_horizon_ofc(param);
シミュレーション#
function simulation(param::SaccadeModelParameter, L, K, dt=0.001, T=2.0, init_pos=-0.5; noisy=true)
@unpack n, A, B, C, D, Y, G, Q, R, U = param
nt = round(Int, T/dt)
X = zeros(n, nt)
u = zeros(nt)
X[1, 1] = init_pos # m; initial position (target position is zero)
if noisy
sqrtdt = √dt
X̂ = zeros(n, nt)
X̂[1, 1] = X[1, 1]
for t in 1:nt-1
u[t] = -L * X̂[:, t]
X[:, t+1] = X[:,t] + (A * X[:,t] + B * u[t]) * dt + sqrtdt * (Y * u[t] * randn() + G * randn(n))
dy = C * X[:,t] * dt + D * sqrtdt * randn(n-1)
X̂[:, t+1] = X̂[:,t] + (A * X̂[:,t] + B * u[t]) * dt + K * (dy - C * X̂[:,t] * dt)
end
else
for t in 1:nt-1
u[t] = -L * X[:, t]
X[:, t+1] = X[:, t] + (A * X[:, t] + B * u[t]) * dt
end
end
return X, u
end
simulation (generic function with 4 methods)
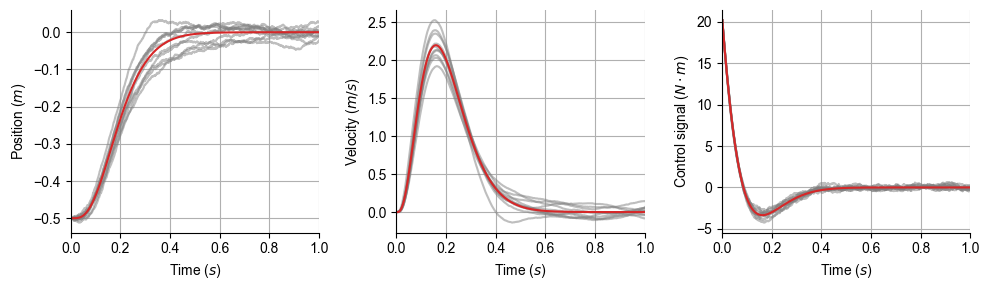
理想状況でのシミュレーション
dt = 1e-3
T = 1.0
1.0
Xa, ua = simulation(param, L, K, dt, T, noisy=false);
ノイズを含むシミュレーション#
n = 4
nsim = 10
XSimAll = []
uSimAll = []
for i in 1:nsim
XSim, u = simulation(param, L, K, dt, T, noisy=true);
push!(XSimAll, XSim)
push!(uSimAll, u)
end
結果の描画#
tarray = collect(dt:dt:T)
label = [L"Position ($m$)", L"Velocity ($m/s$)", L"Acceleration ($m/s^2$)", L"Jerk ($m/s^3$)"]
fig, ax = subplots(1, 3, figsize=(10, 3))
for i in 1:2
for j in 1:nsim
ax[i].plot(tarray, XSimAll[j][i,:]', "tab:gray", alpha=0.5)
end
ax[i].plot(tarray, Xa[i,:], "tab:red")
ax[i].set_ylabel(label[i]); ax[i].set_xlabel(L"Time ($s$)"); ax[i].set_xlim(0, T); ax[i].grid()
end
for j in 1:nsim
ax[3].plot(tarray, uSimAll[j], "tab:gray", alpha=0.5)
end
ax[3].plot(tarray, ua, "tab:red")
ax[3].set_ylabel(L"Control signal ($N\cdot m$)"); ax[3].set_xlabel(L"Time ($s$)"); ax[3].set_xlim(0, T); ax[3].grid()
tight_layout()
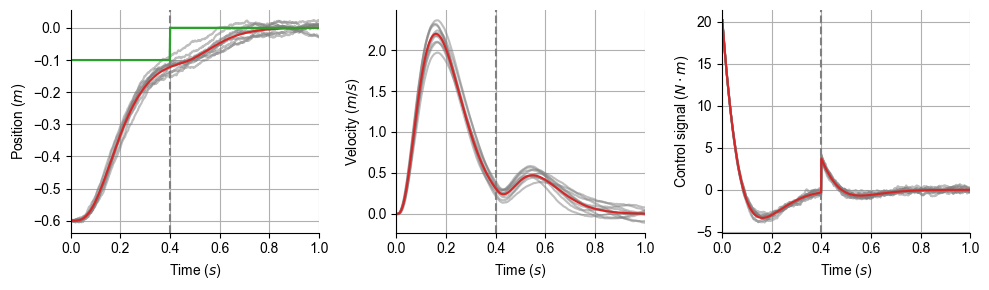
Target jump#
target jumpする場合の最適制御 [Li et al., 2018]
function target_jump_simulation(param::SaccadeModelParameter, L, K, dt=0.001, T=2.0,
Ttj=0.4, tj_dist=0.1,
init_pos=-0.5; noisy=true)
# Ttj : target jumping timing (sec)
# tj_dist : target jump distance
@unpack n, A, B, C, D, Y, G, Q, R, U = param
nt = round(Int, T/dt)
ntj = round(Int, Ttj/dt)
X = zeros(n, nt)
u = zeros(nt)
X[1, 1] = init_pos # m; initial position (target position is zero)
if noisy
sqrtdt = √dt
X̂ = zeros(n, nt)
X̂[1, 1] = X[1, 1]
for t in 1:nt-1
if t == ntj
X[1, t] -= tj_dist # When k == ntj, target jumpさせる(実際には現在の位置をずらす)
X̂[1, t] -= tj_dist
end
u[t] = -L * X̂[:, t]
X[:, t+1] = X[:,t] + (A * X[:,t] + B * u[t]) * dt + sqrtdt * (Y * u[t] * randn() + G * randn(n))
dy = C * X[:,t] * dt + D * sqrtdt * randn(n-1)
X̂[:, t+1] = X̂[:,t] + (A * X̂[:,t] + B * u[t]) * dt + K * (dy - C * X̂[:,t] * dt)
end
else
for t in 1:nt-1
if t == ntj
X[1, t] -= tj_dist # When k == ntj, target jumpさせる(実際には現在の位置をずらす)
end
u[t] = -L * X[:, t]
X[:, t+1] = X[:, t] + (A * X[:, t] + B * u[t]) * dt
end
end
X[1, 1:ntj-1] .-= tj_dist;
return X, u
end
target_jump_simulation (generic function with 6 methods)
Ttj = 0.4
tj_dist = 0.1
nt = round(Int, T/dt)
ntj = round(Int, Ttj/dt);
Xtj, utj = target_jump_simulation(param, L, K, dt, T, noisy=false);
XtjAll = []
utjAll = []
for i in 1:nsim
XSim, u = target_jump_simulation(param, L, K, dt, T, noisy=true);
push!(XtjAll, XSim)
push!(utjAll, u)
end
target_pos = zeros(nt)
target_pos[1:ntj-1] .-= tj_dist;
fig, ax = subplots(1, 3, figsize=(10, 3))
for i in 1:2
ax[1].plot(tarray, target_pos, "tab:green")
for j in 1:nsim
ax[i].plot(tarray, XtjAll[j][i,:]', "tab:gray", alpha=0.5)
end
ax[i].axvline(x=Ttj, color="gray", linestyle="dashed")
ax[i].plot(tarray, Xtj[i,:], "tab:red")
ax[i].set_ylabel(label[i]); ax[i].set_xlabel(L"Time ($s$)"); ax[i].set_xlim(0, T); ax[i].grid()
end
for j in 1:nsim
ax[3].plot(tarray, utjAll[j], "tab:gray", alpha=0.5)
end
ax[3].axvline(x=Ttj, color="gray", linestyle="dashed")
ax[3].plot(tarray, utj, "tab:red")
ax[3].set_ylabel(L"Control signal ($N\cdot m$)"); ax[3].set_xlabel(L"Time ($s$)"); ax[3].set_xlim(0, T); ax[3].grid()
tight_layout()
参考文献#
- LMSQ18
Zhe Li, Pietro Mazzoni, Sen Song, and Ning Qian. A single, continuously applied control policy for modeling reaching movements with and without perturbation. Neural Comput., 30(2):397–427, February 2018.
- QJJM13
Ning Qian, Yu Jiang, Zhong-Ping Jiang, and Pietro Mazzoni. Movement duration, fitts's law, and an infinite-horizon optimal feedback control model for biological motor systems. Neural Comput., 25(3):697–724, March 2013.